multirotor¶
![]()
Simulation of multi-rotor unmanned aerial vehicles in python.
This package provides an object-oriented interface for modeling and simulating motors, propellers, and airframe of a UAV. Additionally, an OpenAI gym-compatible environment is provided for Reinforcement Learning experiments.
See the Demo jupyter notebook in the repository for a walkthrough.
Code repository: Github
Please cite this as:
@inproceedings{ahmed2022multirotor,
title={A high-Fidelity Simulation test-Bed for fault-Tolerant octo-Rotor Control Using Reinforcement Learning},
author={Ahmed, Ibrahim and Quinones-Grueiro, Marcos and Biswas, Gautam},
booktitle={2022 IEEE/AIAA 41st Digital Avionics Systems Conference (DASC)},
year={2022},
organization={IEEE}
}
Installation¶
Install from the Python Package Index (PyPI):
pip install multirotor
Or, clone repository and install for development. This will allow you to change the code of the package so the changes show up when you import multirotor in other projects.
git clone https://github.com/hazrmard/multirotor.git
cd multirotor
pip install -e .
# to also install dependencies for building package/documentation
pip install -e .[DEV]
pip install -r docs/requirements.txt
Code organization¶
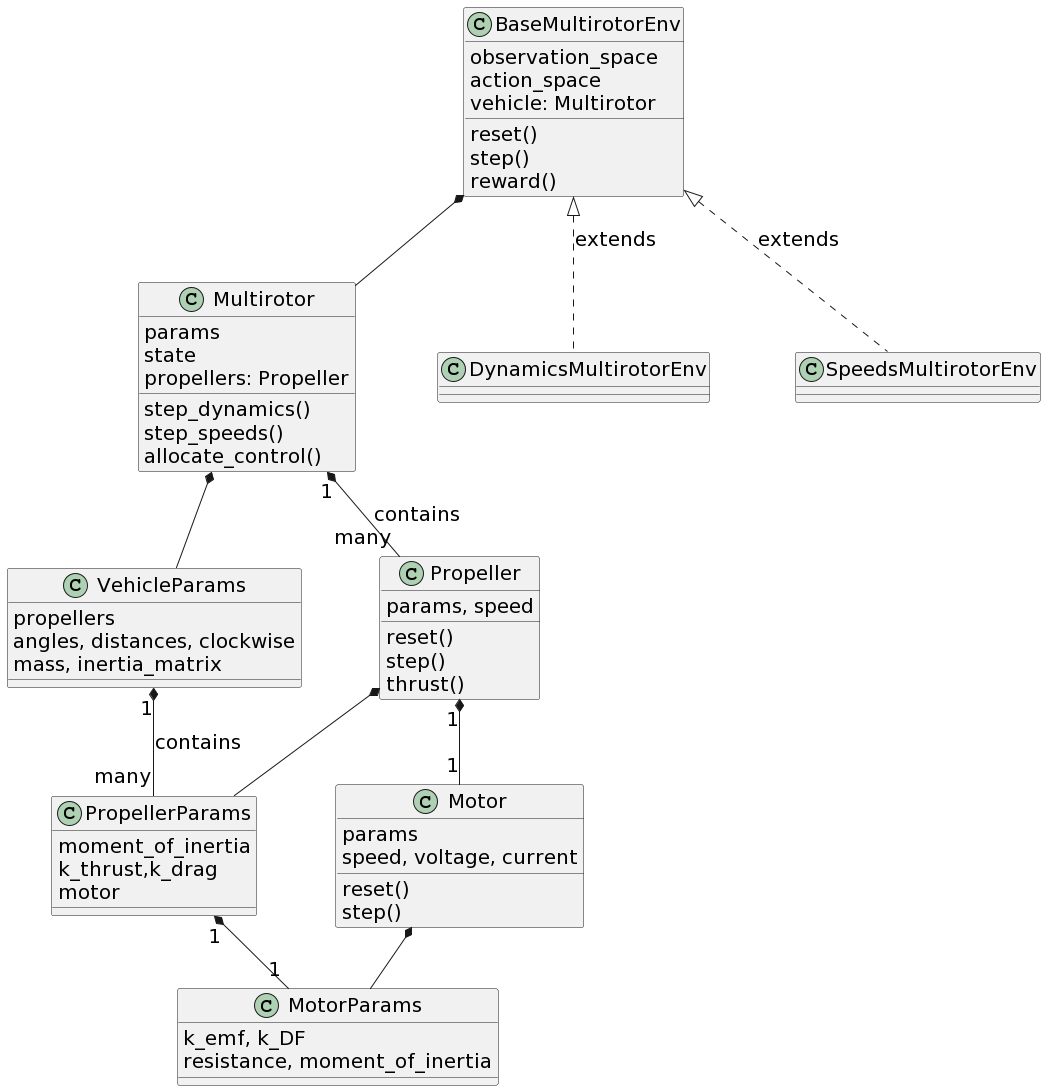
The following main classes are available in the code. For simulating the vehicle:
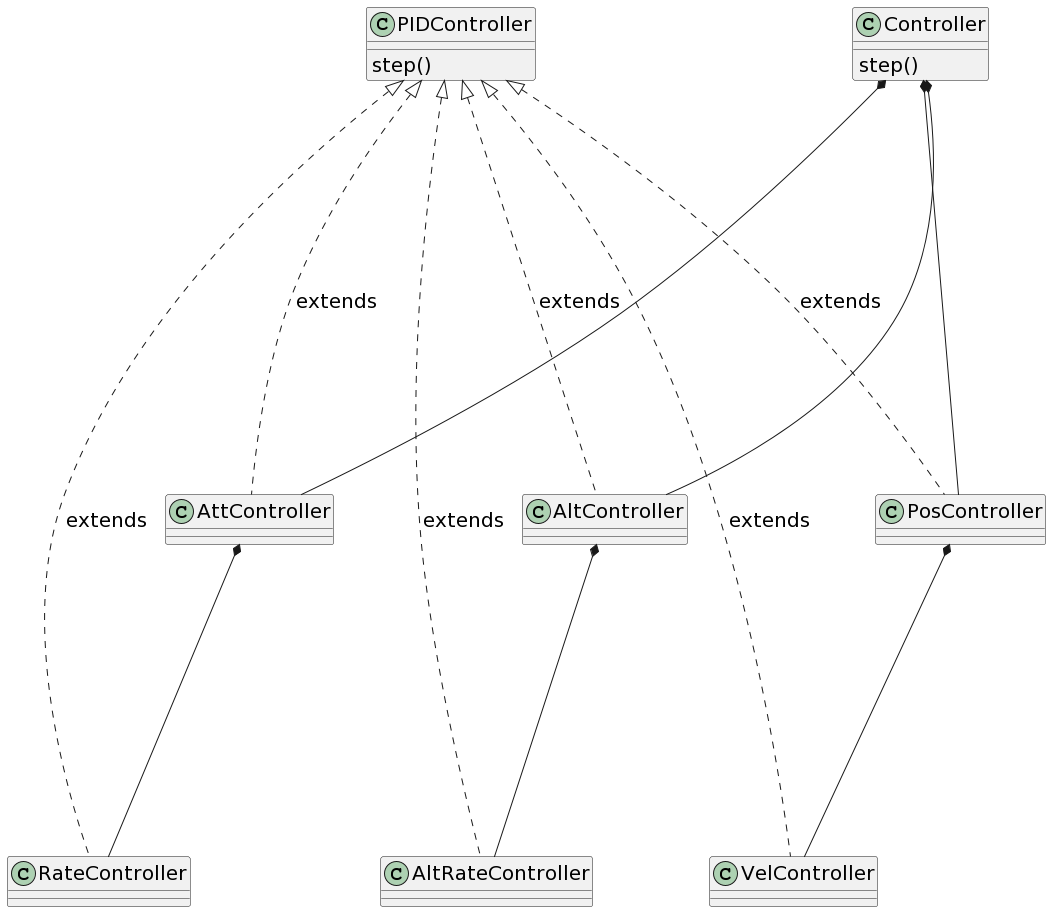
And for simulating control: